Italiano
Italiano


MECHA
Tecnologia mechatronica
Le immagini seguenti mostrano gli stati successivi di funzionamento del sistema di attuazione comune alle pinze, agli attuatori ed alle tavole rotanti elettriche. 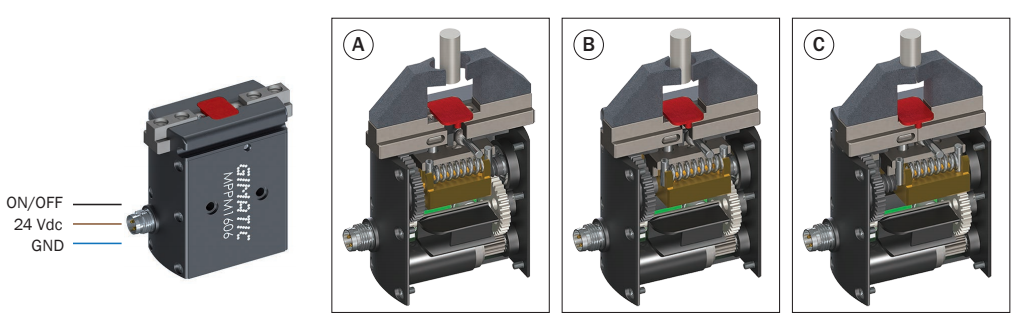
Gli stessi stati sono riconoscibili anche nel profilo di corrente di assorbimento del motore.
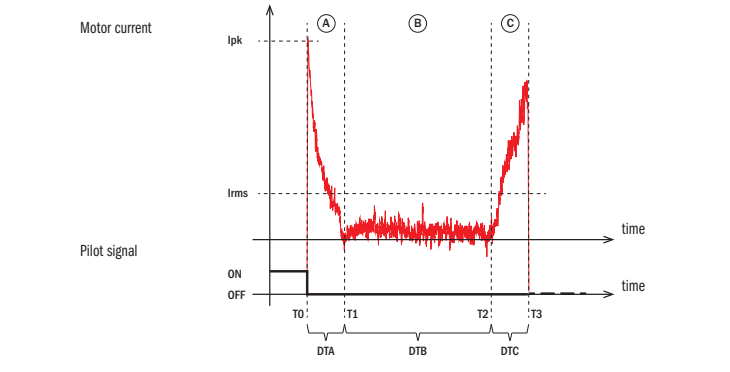
Descrizione del funzionamento
Al tempo T0 il segnale di pilotaggio passa dallo stato di ON allo stato di OFF comandando la chiusura delle griffe. Durante il periodo DTA il motore inizia la rotazione causando nella fase A l’estensione della molla inizialmente compressa. Nella fase B la molla ha assunto la sua lunghezza libera e le griffe compiono un movimento a velocità costante fino al contatto con il pezzo al tempo T2. Durante la fase 3 le griffe sono a contatto con il pezzo ed inizia la compressione della molla. Al tempo T3 il motore termina la propria rotazione e grazie al sistema di trasmissione irreversibile la presa è mantenuta anche in assenza di tensione di alimentazione fino al prossimo comando di apertura delle griffe (stato ON).

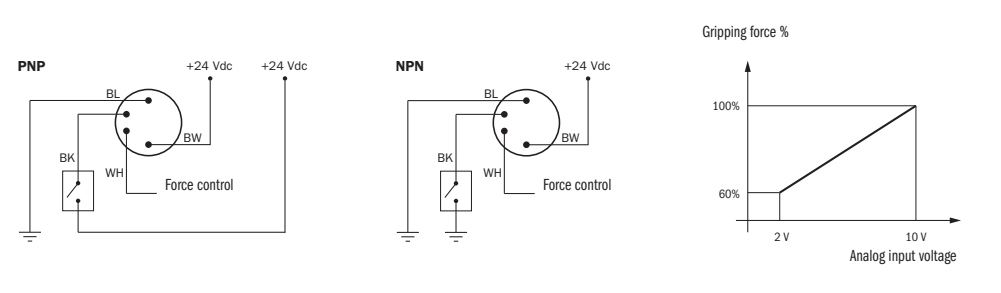
Versioni PNP/NPN
Le pinze sono disponibili nella versione standard con ingresso tipo PNP e nella versione N con ingresso tipo NPN.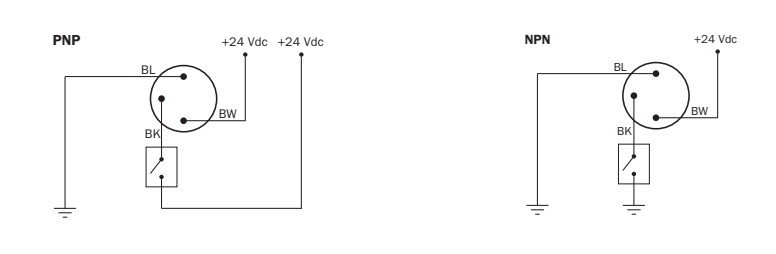
Controllo di forza (versioni con 4 pin)
Tra i modelli con connettore M8 a 4 pin sono disponibili versioni con un canale di ingresso analogico. Variando la tensione di riferimento nell’intervallo 2÷10 V è possibile regolare la forza di presa. Un valore di tensione inferiore ai 2 V inibisce il funzionamento del dispositivo consentendo la creazione di logiche di sicurezza di macchina.
Uscita picco
In the range of models with 4-pin M8 connector, some versions are available with a digital output channel which is automatically enabled by the device when the jaws exert the gripping force.
This will work like an integrated proximity sensor which can operate independently of the final position of the jaws, and therefore with no adjustment.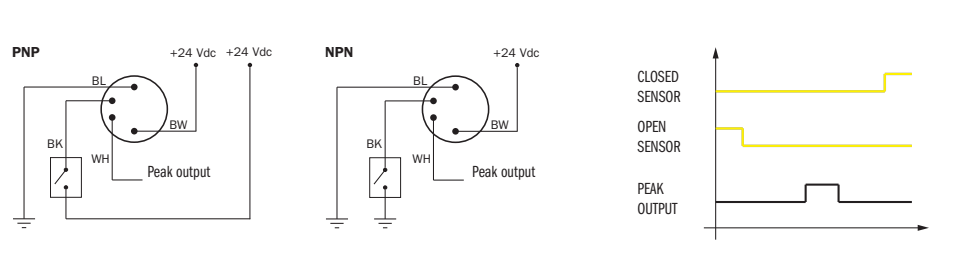
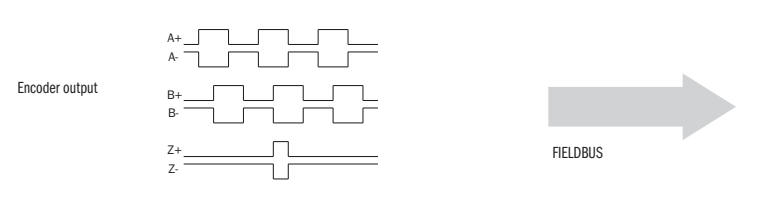
Position output and fieldbus
Versions with an output channel (digital and/or analog) dedicated to jaw position measurement will soon be available, as well as versions set for communication based on digital fieldbus.